Genesis AI published Genesis World 1.0 on May 27, 2026, unveiling a simulation platform designed to accelerate evaluation of robotics foundation models. The company reports a Pearson correlation of 0.8996 (95% CI: [0.7439, 0.9314]) between simulation outcomes and real-robot rollouts, and says the stack reduces a standard multi — task policy evaluation from over 200 continuous hardware hours to under 0.5 hours in simulation. That speedup aims to let researchers run many more statistically meaningful checkpoint comparisons in the same calendar time.
The release bundles four components: a Genesis World physics engine, Nyx (a real-time path-traced renderer), Quadrants (a Python — to-GPU compiler), and a simulation interface and tooling layer. Nyx is distributed as the gs-nyx-plugin with prebuilt wheels for x86 — 64 Linux (manylinux 2.34+) and Windows 10/11 and requires an NVIDIA GPU with CUDA. The stack emphasizes bit-exact repeatability across runs to ensure evaluation consistency.
Genesis framed the platform around iteration speed rather than data volume and intentionally separated evaluation from training. Evaluated policies are trained only on real-world data under a zero-shot real-to-sim protocol to avoid simulator overfit being mistaken for real improvements. The team also built a real-time side-by-side rig that can swap simulator and robot observations to help isolate where divergences originate.
Measured runtime and workflow impacts are substantial: Genesis World runs the same evaluation workload that formerly required a single robot and operator for hundreds of hours in under 30 minutes (0.5 hours) with no human or hardware in the loop. Batched physics execution enables thousands of parallel rollouts and the system produces bit-exact consistency across repeated simulation passes, allowing many more statistically valid comparisons between checkpoints.
Nyx’s renderer targets noise — free 1080p frames in about 4 ms on a high-end consumer GPU using a GPU-driven bindless architecture, visibility buffers, MSAA, hardware ray tracing, matrix cores, and video compression to meet that latency without baking. Path tracing serves as the baseline for correct multi — bounce lighting and indirect illumination; realism is further improved with a physically grounded camera model, HDRI lighting from measured radiance, photogrammetry — scanned assets, and 3D Gaussian splats where meshes fall short.
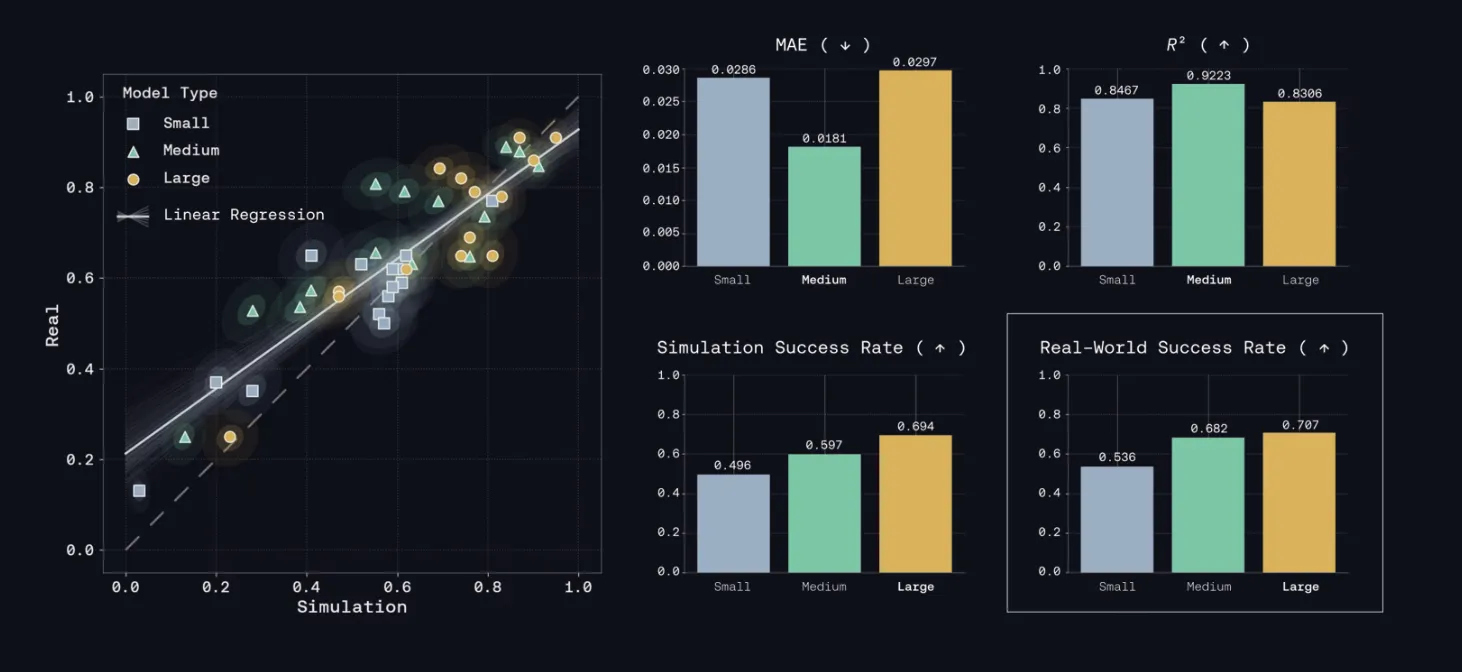
Genesis validated sim-to-real performance across three model sizes (Small, Medium, Large) on 14 tasks with 200 episodes per task. They ran 1,000,000 bootstrap iterations to compute confidence intervals, reported a Mean Maximum Rank Violation (MMRV) of 0.0166 (95% CI: [0.0102, 0.0474]), and said their measured reality gap is 45% smaller by FID on their dataset than the next-best alternative simulator.
Sources
Replies (0)
No replies in this topic yet.