Genesis IA lanzó Genesis World 1.0 el 27 de mayo de 2026, una plataforma de simulación destinada a acelerar y escalar la evaluación de modelos base de robótica. Al permitir evaluaciones rápidas y sin hardware humano en el lazo, la compañía busca reducir un cuello de botella clave en el desarrollo robótico: la velocidad de iteración.
La plataforma integra cuatro componentes principales: el motor de física Genesis World; Nyx, un renderizador trazado de rayos en tiempo real; Quadrants, un compilador que traduce Python a GPU; y una interfaz de simulación para orquestar evaluaciones. El conjunto está pensado para separar el flujo de evaluación del de generación de datos simulados y así medir rendimiento de políticas de forma más directa.
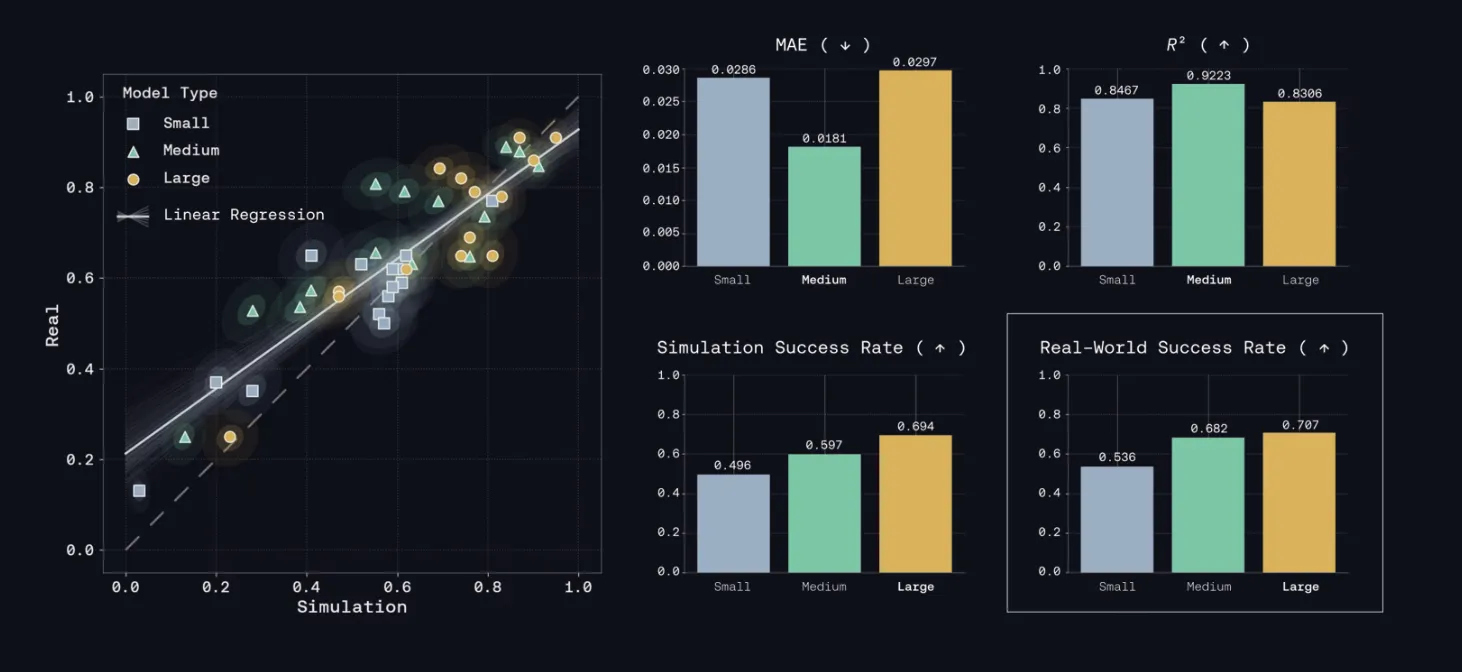
En pruebas internas, Genesis reportó una correlación de Pearson de 0.8996 entre resultados de simulación y despliegues reales (IC 95%: [0.7439, 0.9314]). La evaluación incluyó tres variantes de modelo — Small, Medium y Large — ejecutadas en 14 tareas con 200 episodios por tarea; el equipo usó 1.000.000 de iteraciones bootstrap para estimar los intervalos. El MMRV observado fue 0.0166 (IC 95%: [0.0102, 0.0474]).
La compañía afirma además que una pasada de evaluación que en el entorno físico exige más de 200 horas y la presencia de un operador se completa en simulación en menos de 0.5 horas, con resultados bit‑exactos y sin hardware humano en el lazo. Esa reducción de tiempo pretende acelerar ciclos de prueba y despliegue. Para minimizar el riesgo de que las mejoras reflejen ajuste excesivo a la dinámica del simulador, Genesis prioriza un flujo de evaluación separado del de generación de datos y propone un enfoque «zero‑shot real‑to‑sim», que evalúa políticas entrenadas exclusivamente con datos reales.
Fuentes
Respuestas (0)
Aún no hay respuestas en este tema.